




Gleasondentes conici spiralesSunt genus speciale rotarum dentatarum conicarum ad vim transmittendam inter axes intersecantes, plerumque ad angulum nonaginta graduum, destinatarum. Quod systema Gleason distinguit est geometria dentium singularis et modus fabricationis, quae motum lenem, capacitatem momenti magnam, et operationem quietam praebent. Hae rotae dentatae late in transmissionibus autocineticis, industrialibus, et aerospatialibus adhibentur, ubi fides et praecisio criticae sunt.
Systema Gleason elaboratum est ad emendanda recta etdentes conici zerolIntroductione dentis curvi, spiralis. Haec forma spiralis gradatim inter dentes coniungi potest, strepitum et vibrationem significanter minuens, dum celeritates rotationis et capacitatem oneris maiores permittunt. Designatio etiam rationem contactus et robur superficiale auget, efficientem transmissionem potentiae sub oneribus gravibus vel dynamicis curans.
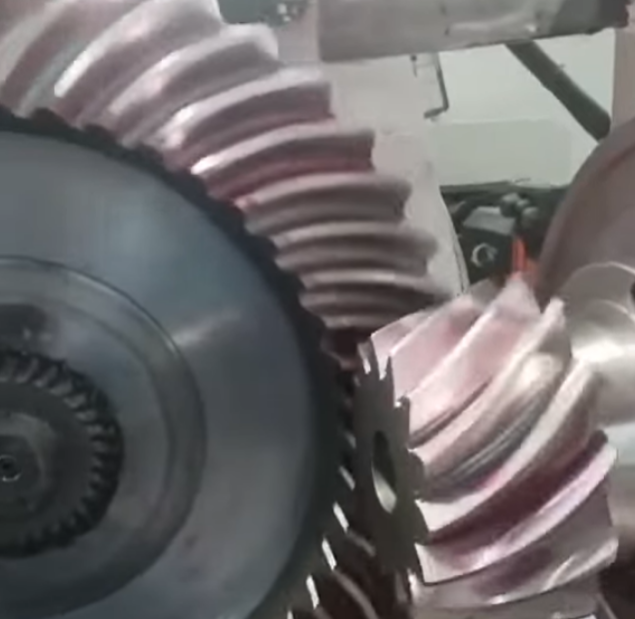
Quaeque par dentatum spiralium conicarum Gleason constat ex pinione et dentatura congruenti, geometria congruenti productis. Processus fabricationis valde specializatus est. Incipit cum cudendo vel fusione accurata partium chalybis mixti, ut 18CrNiMo7-6, deinde secatur asperum, dentatura, vel formatur ad formam initialem dentaturae generandam. Methodi provectae, ut machinatio quinque-axium, dentatura levigationis, et sectio dura, praestant magnam accuratam dimensionalitatem et optimum aspectum superficiale. Post curationem caloris, ut carburizationem (58-60 HRC), dentaturae laminationem vel trituram subeunt ad perfectam congruentiam inter pinionem et dentaturam efficiendam.
Geometria dentatum spiralium conicarum Gleason pluribus parametris criticis definitur — angulo spirali, angulo pressionis, distantia coni inferioris, et latitudine superficiei. Hi parametri accurate calculantur ut rectae formae contactus dentium et distributio oneris curent. Per inspectionem finalem, instrumenta qualia sunt machina mensurae coordinatarum (CMM) et analysis contactus dentium (TCA) verificant dentaturam classi praecisionis requisitae DIN 6 vel ISO 1328-1 satisfacere.

In operatione, spiralis Gleasonianadentes coniciMagnam efficacitatem et stabilem functionem etiam sub condicionibus difficilibus offerunt. Dentes curvi contactum continuum praebent, concentrationem tensionis et detritionem minuentes. Hoc eos ideales reddit pro differentialibus autocineticis, capsis rotarum autocinetorum onerariorum, machinis gravibus, systematibus propulsionis maritimis, et instrumentis electricis. Praeterea, facultas geometriam dentium et distantiam montaturae accommodandi permittit ingeniariis designum ad specificas angustias torques, celeritatis, et spatii optimizare.
Tabula computationis clavium dentatae spiralis conicae generis Gleason
| Res | Formula / Expressio | Variabiles / Notae |
|---|---|---|
| Parametri inputati | (z_1, z_2, m_n, alpha_n, Sigma, b, T) | dentes pinionis/cinguli dentati (z); modulus normalis (m_n); angulus pressionis normalis (α_n); angulus axis (σ); latitudo faciei (b); momentum torquens transmissum (T). |
| Diameter referentialis (medius) | (d_i = z_i, m_n) | i = 1 (pinio), 2 (rota dentata). Diameter medius/referentialis in sectione normali. |
| Anguli coni (inclinationis) | (Δ1, Δ2) ita ut (Δ1 + Δ2 = ΔSigma) et (∈{sin Δ1}{d1} = ∈sin Δ2}{d2}) | Angulos coni cum proportionibus dentium et angulo axis congruentes solve. |
| Distantia coni (distantia apicis et anguli) | (R = \dfrac{d_1}{2\sin\delta_1} = \dfrac{d_2}{2\peccatum delta_2}) | Distantia ab apice coni ad circulum angulare secundum generatricem mensurata. |
| Inclinatio circularis (normalis) | (p_n = π_m_n) | Inclinatio linearis in sectione normali. |
| Modulus transversalis (circiter) | (m_t = \dfrac{m_n}{cos\beta_n}) | (β_n) = angulus spiralis normalis; inter sectiones normales et transversales pro re nata transformatur. |
| Angulus spiralis (relatio media/transversa) | (\tan beta_t = \tan beta_n \cos\delta_m) | (Δm) = angulus coni medius; transformationes inter angulos normales, transversos, et spirales medios adhibe. |
| Latitudo faciei commendata | (b = k_b, m_n) | (k_b) typice ab 8 ad 20 eligitur, pro magnitudine et applicatione; consule rationem designandi pro valore exacto. |
| Addendum (medium) | (a circiter m_n) | Approximatio addendae plenae profunditatis normalis; adhibe tabulas proportionum dentium exactarum pro valoribus praecisis. |
| Diameter externus (apicis) | (d_{o,i} = d_i + 2a) | i = 1,2 |
| Diameter radicis | (d_{f,i} = d_i – 2h_f) | (h_f) = dedendum (ex proportionibus systematis dentati). |
| Crassitudo dentis circularis (circiter) | (s \circiter \dfrac{\pi m_n}{2}) | Pro geometria beveli, crassitudine correcta ex tabulis dentium ad accuratam accessionem adhibenda est. |
| Vis tangentialis ad circulum pitch | (F_t = \dfrac{2T}{d_p}) | (T) = momentum torquens; (d_p) = diameter primi (unitatibus congruentibus utere). |
| Tensio flexionis (simplificata) | (∫sigmab = (∫frac{Ft ∫KO ∫KV}{b ∫mn ∫Y}) | (K_O) = factor oneris excessivi, (K_V) = factor dynamicus, (Y) = factor formae (geometria flexionis). Aequationem flexionis AGMA/ISO plenam ad designandum adhibe. |
| Tensio contactus (typi Hertz, simplificata) | (sigma_H = C_H \sqrt{\frac{F_t}{d_p, b} \cdot \frac{1}{\frac{1-\nu_1^2}{E_1} + \frac{1-\nu_2^2}{E_2}}) | Constans geometrica (C_H), moduli elasticitatis materialis (E_i, νi) et rationes Poisson. Aequationes plenae tensionis contactus ad verificationem adhibentur. |
| Ratio contactus (generalis) | (\varepsilon = \dfrac{\text{arcus actionis}}{\text{gradus basis}}) | Pro rotis dentatis conicis, computatio per geometriam coni anguli inferioris et angulum spiralem; typice aestimatur cum tabulis designationis rotis dentatis vel programmate. |
| Numerus dentium virtualis | (z_v circiter \dfrac{d}{m_t}) | Utile ad probationes contactus/subsectionis; (m_t) = modulus transversus. |
| Dentes minimi / probatio subsectionis | Utere minima condicione dentium secundum angulum spiralem, angulum pressionis et proportiones dentium. | Si (z) infra minimum est, subsectio vel instrumenta specialia requiruntur. |
| Machinae/sectoris ordinationes (gradus designandi) | Angulos capitis secatorii, rotationem cunabulorum et indicationem ex geometria systematis dentati determina. | Hae optiones ex geometria dentatae et systemate cultri derivantur; rationem machinae/instrumenti sequere. |
Technologia productionis moderna, ut puta machinae CNC ad secandas et poliendas rotas conicas dentatas, qualitatem constantem et permutabilitatem praestat. Integrando designum computatro adiutum (CAD) et simulationem, fabri possunt machinationem inversam et probationes virtuales ante productionem actualem perficere. Hoc tempus productionis et sumptus minuit, simul praecisionem et fidem auget.

Summa summarum, dentes conici spirales Gleason perfectam combinationem geometriae provectae, roboris materiae, et praecisionis fabricationis repraesentant. Eorum facultas transmissionem potentiae lenem, efficientem, et diuturnam praebendi eos elementum indispensabilem in systematibus impulsoriis modernis fecit. Sive in sectoribus autocineticis, industrialibus, sive aëronauticis adhibeantur, hi dentes excellentiam in motu et effectu mechanico definire pergunt.
Tempus publicationis: Oct-XXIV-MMXXV